納式的油水面物位儀的設(shè)計(jì)選取與應(yīng)用")
一種基于射頻導(dǎo)納式的油水面物位儀的設(shè)計(jì)選取與應(yīng)用
摘要:隨著數(shù)字微電子技術(shù)和計(jì)算機(jī)技術(shù)的不斷發(fā)展,物位測(cè)量技術(shù)發(fā)展迅速,利用時(shí)間行程原理非接觸式測(cè)量的超聲、雷達(dá)等物位測(cè)量技術(shù),還有應(yīng)用較為成熟的電容及各種電子型物位測(cè)量技術(shù),都已慢慢成為物位測(cè)量方法中的重要手段,與原來機(jī)械式的物位測(cè)量?jī)x表在各種應(yīng)用領(lǐng)域優(yōu)缺點(diǎn)互補(bǔ)。本文介紹了一種基于射頻導(dǎo)納式油水界面物位儀的設(shè)計(jì)原理分析及選取,并應(yīng)用于油田項(xiàng)目的油水界面測(cè)量。
射頻導(dǎo)納物位檢測(cè)技術(shù)是當(dāng)前精度較高、原理較為先金的物位儀,能夠?qū)υS多應(yīng)用場(chǎng)合對(duì)容器內(nèi)介質(zhì)進(jìn)行物位或界位測(cè)量,與傳統(tǒng)電容式物位儀相比有著很大的技術(shù)優(yōu)勢(shì)。隨著我國綜合國力的不斷提升,石油石化工業(yè)取得了長足的進(jìn)步,物位儀是油氣田地面工程建設(shè)過程中必不可少的重要儀器設(shè)備,在測(cè)量物位、液位等方面發(fā)揮著重要作用。
1 物位計(jì)及界位儀表
射頻導(dǎo)納物位儀是一種從電容式發(fā)展起來的,具有防掛料、更可靠、更準(zhǔn)確、適用性更廣的新型物位控制技術(shù),是電容式物位技術(shù)的升級(jí)。下面就該種物位儀的原理展開分析和研究,并對(duì)其應(yīng)用情況加以探討。
2 電容式物位儀工作原理
電容式物位計(jì)是在一個(gè)容器中建立起一個(gè)電容, 將該電容的一極設(shè)置為浸沒在某容器中的桿狀探頭,電容的另外一極則設(shè)置為一個(gè)接地的金屬板(該金屬板通常為容器壁),再設(shè)以空氣為介質(zhì)的電容為C1,設(shè)以被測(cè)物料為介質(zhì)的電容為C2,可以計(jì)算出電極間的電容值為:C=C1+C2。如果我們?cè)O(shè)被測(cè)介質(zhì)為導(dǎo)體,那么就必須在探頭上加一層絕緣層,再設(shè)被測(cè)物料上部以絕緣層為介質(zhì)的電容為C1a,以空氣為介質(zhì)的電容為C1b,被測(cè)物料部分以絕緣層為介質(zhì)的電容為C2a,則電極間的電容為:C=(C1a·C1b)/(C1a+C1b)+C2a。經(jīng)推導(dǎo)可得兩電極間的電容C與被測(cè)物位高度h的關(guān)系為:C=C0 +k·h。式中C0和k是與介電常數(shù)、容器結(jié)構(gòu)有關(guān)的常數(shù)。當(dāng)物位變化時(shí),被測(cè)介質(zhì)對(duì)探頭的浸沒高度h發(fā)生變化,從而使電容C發(fā)生變化,通過測(cè)量電容C得到物位高度h(即為物位儀測(cè)量目標(biāo)值)。
3 射頻導(dǎo)納物位儀工作原理
3.1 射頻導(dǎo)納技術(shù)簡(jiǎn)介
射頻導(dǎo)納物位儀是一種從電容式發(fā)展起來的防掛料更可靠、更準(zhǔn)確、使用性更廣的液位測(cè)量技術(shù),與電容式物位儀相比精度更高、易用性更好。射頻就是高頻無線電波譜,導(dǎo)納為阻抗的倒數(shù),它是電阻性成分、電容性成分、電感性成分綜合而成。射頻導(dǎo)納物位計(jì)通用性是非常高的,其支持HART協(xié)議的智能式物位變送器更顯示出卓越的性能:(1)較高的準(zhǔn)確度;(2)永久保存數(shù)據(jù),不怕斷電丟失;(3)可以進(jìn)行容器參考標(biāo)定;(4)物位的任意兩點(diǎn)標(biāo)定;(5)多過程量輸出;(6)可以進(jìn)行非線形校正。
3.2 射頻導(dǎo)納液位儀工作原理
由于電容式物位儀掛料的橫截面積較小,掛料的等效電阻較大,掛料的等效電路如圖1所示,掛料可以看做由許多微小的電阻和電容組成。從數(shù)學(xué)上可以證明,只要粘附層足夠長,粘附層的電阻和電容具有相同的阻抗, 這就是射頻導(dǎo)納定理。將測(cè)量電極上帶有粘附層的容器的外壁接地, 在測(cè)量電極和地之間加一高頻激勵(lì)信號(hào),由掛料的等效電路可知,在測(cè)量電極和地之間沒有直流通路,因此,可以得掛料電極的等效電路。
設(shè):U為頻率為ω的激勵(lì)電壓;Iw為流過被測(cè)實(shí)際物位電容的電流;Ig為流過粘附層的電流,I為總的電流。I=Iw+Ig。Cw為實(shí)際的物位電容,Cg和Rg分別為掛料電容和掛料電阻,
當(dāng)粘附層無限長時(shí),由射頻導(dǎo)納定理可知,Cg與Rg的阻抗相等,即Rg=1/ω·Cg。
設(shè):U的相位為0,即U=U<0°,即Iw =jω·Cw·U=ω·Cw·U<90° (1)Ig={1/Rg+jω·Cg }·U=(1+j)ω·Cg·U =√2ω·Cg·U<45°
(2)由式(1)、(2)可知,Ig的相位落后于Iw的相位π/4。設(shè)Iw的相位為0,如果在π/4處對(duì)I進(jìn)行測(cè)量,則此刻粘附層電流I g的幅值為零,這樣測(cè)得的電流中只包含Iw,而Iw與實(shí)際物位電容Cw之間存在線形關(guān)系,因此,在ω·t =π/4+2kπ(k=1,2,…n)時(shí)對(duì)電流I 進(jìn)行測(cè)量,可以得到實(shí)際的物位值,這就是射頻導(dǎo)納物位儀表的工作原理。
4 射頻導(dǎo)納液位儀測(cè)量系統(tǒng)設(shè)計(jì)原理
4.1 系統(tǒng)設(shè)計(jì)
系統(tǒng)框圖如2所示,整個(gè)測(cè)量?jī)x系統(tǒng)由標(biāo)準(zhǔn)正弦信號(hào)發(fā)生器、物位傳感器、帶通濾波器、變壓器電橋測(cè)量、電容驅(qū)動(dòng)電路、同步信號(hào)、微機(jī)系統(tǒng)、鍵盤電路、采樣保持電路、報(bào)警電路、顯示電路等11個(gè)部分組成。其中,標(biāo)準(zhǔn)正弦信號(hào)發(fā)生電路穩(wěn)定發(fā)出頻率為100kHz的射頻信號(hào), 但是含有其他頻率的干擾信號(hào),所以信號(hào)須經(jīng)帶通濾波電路,將干擾信號(hào)過濾掉,從而獲得穩(wěn)定的、近似純凈的100kHz射頻信號(hào)。電容驅(qū)動(dòng)電路的作用主要是用于提高物位測(cè)量范圍值,使整個(gè)系統(tǒng)的性能更為優(yōu)越。
變壓器電橋測(cè)量電路的作用是將物位信號(hào)轉(zhuǎn)化系統(tǒng)可以識(shí)別的電壓信號(hào),電壓信號(hào)經(jīng)過處理變?yōu)閮陕?其中一路包含物位信息、掛料信息,另外一路提供采樣時(shí)刻的同步信號(hào)。如此,同步信號(hào)經(jīng)過系統(tǒng)處理,可以給出準(zhǔn)確的采樣時(shí)刻,并在相應(yīng)時(shí)刻對(duì)具體測(cè)量信號(hào)進(jìn)行采樣,這樣就得到準(zhǔn)確的物位信息,消除電極掛料誤差。
系統(tǒng)檢測(cè)得到的物位信號(hào)經(jīng)低通濾波電路處理,消除所有干擾,信號(hào)進(jìn)入微處理系統(tǒng),進(jìn)行AD模數(shù)轉(zhuǎn)換,數(shù)據(jù)計(jì)算,得出實(shí)際物位數(shù)據(jù),再將實(shí)際物位數(shù)據(jù)與設(shè)定數(shù)據(jù)值進(jìn)行對(duì)比,得出物位值。另外,如果對(duì)比之超過報(bào)警界限,系統(tǒng)發(fā)出報(bào)警信號(hào)。鍵盤電路的作用是方便用戶通過鍵盤輸入相關(guān)命令信號(hào),可對(duì)系統(tǒng)實(shí)現(xiàn)校零、標(biāo)定等操作。
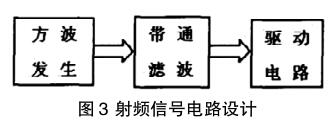
4.1.1 射頻信號(hào)電路設(shè)計(jì)
本項(xiàng)目中的射頻信號(hào)是方波信號(hào)經(jīng)過帶通濾波處理獲取,該電路由三個(gè)電路組成:方波發(fā)生電路、帶通濾波電路、驅(qū)動(dòng)電路,如圖3所示。
先由方波發(fā)生電路發(fā)出方波信號(hào),方波信號(hào)經(jīng)過帶通濾波電路得到正弦信號(hào)電路,#后由驅(qū)動(dòng)電路將正弦信號(hào)電路處理得到符合要求的信號(hào)。高頻信號(hào)是作為被測(cè)物的容性負(fù)載存在,所以激勵(lì)信號(hào)頻率要始終,以免出現(xiàn)阻抗很大(頻率低的時(shí)候,阻抗大)或者容抗很大(頻率過高的情況下容抗會(huì)很大)的情況。本物位儀采取100KHz為正弦激勵(lì)信號(hào)的頻率。
4.1.2 微處理系統(tǒng)硬件設(shè)計(jì)
微處理系統(tǒng)是硬件電路的核心部分,關(guān)系到整個(gè)儀表系統(tǒng)的性能、處理速度以及抗干擾能力等方面。微處理系統(tǒng)芯片的選型十分關(guān)鍵:尋址方式、功耗大小、執(zhí)行速度、抗干擾能力、開發(fā)環(huán)境、指令結(jié)構(gòu)等方面都是需要考量的問題。
4.2 系統(tǒng)軟件設(shè)計(jì)
系統(tǒng)軟件要充分考慮到各個(gè)模塊之間的好立性,這樣才有利于各子程序的編寫和調(diào)試。所以在物位儀軟件上,充分考慮了后期的測(cè)試工作,夠保證系統(tǒng)的穩(wěn)定性、靈活性。本項(xiàng)目中界位儀的整個(gè)軟件系統(tǒng)由主程序、初始化、數(shù)據(jù)采集、數(shù)據(jù)處理、按鍵顯示、數(shù)模輸出、通信等幾個(gè)部分組成。
4.2.1 主程序設(shè)計(jì)
主程序主要是完成各個(gè)變量(主要是全局變量)的定義、初始化,設(shè)置特殊功能寄存器,開啟特殊中斷,規(guī)定整個(gè)程序系統(tǒng)的執(zhí)行順序,協(xié)調(diào)各個(gè)功能模塊。
4.2.2 信號(hào)采集程序設(shè)計(jì)
信號(hào)采集程序是負(fù)責(zé)整個(gè)系統(tǒng)的數(shù)據(jù)采集。模數(shù)采樣控制、采樣通道散轉(zhuǎn)控制是信號(hào)采集程序#重要的兩個(gè)方面,如圖4所示。采集通道切換先打開,激勵(lì)電壓實(shí)部、激勵(lì)電壓虛部、響應(yīng)電壓實(shí)部、響應(yīng)電壓虛部等四個(gè)軟件模塊同時(shí)打開,A/D采樣模塊開始工作,然后對(duì)采樣次數(shù)進(jìn)行判斷(若采樣次數(shù)不為5就繼續(xù)采樣,若采樣次數(shù)為5就將采樣次數(shù)重新致0,然后將通道次數(shù)加1),然后繼續(xù)判斷通道采樣次數(shù)(若通道采樣的采樣次數(shù)為4,則采樣通道致0,若不為4則重新開始)。
4.2.3 數(shù)字濾波程序
濾波是自控領(lǐng)域?qū)y(cè)量信號(hào)進(jìn)行處理的#常見方法,可以通過數(shù)字濾波也可以通過硬件濾波來實(shí)現(xiàn)。硬件濾波方式較為固定,成本比較高,且對(duì)于微處理系統(tǒng)來說,占用空間較大、存儲(chǔ)容量要求較高,所以可行性較低。故而,一般來說,很多自動(dòng)化系統(tǒng)都采用數(shù)字濾波和硬件濾波組合的方式來實(shí)現(xiàn)。本項(xiàng)目的物位儀采用了占優(yōu)濾波方式。
5 射頻導(dǎo)納式物位儀測(cè)量油水界面在某項(xiàng)目上的應(yīng)用
5.1 油田項(xiàng)目油水界面測(cè)量
射頻導(dǎo)納式物位儀測(cè)量油水界面在油田項(xiàng)目上應(yīng)用廣泛,本文以某油田地面工程三相分離器的實(shí)際應(yīng)用為例。這是物位儀表在物位測(cè)量的典型應(yīng)用模型。原油三相分離器,是實(shí)現(xiàn)油、氣、水三相分離的設(shè)備。
原油三相分離器包括預(yù)分離區(qū)、分離區(qū)、沉降室、油室和氣室。原油在分離器入口處的預(yù)分離筒進(jìn)行氣液初步分離,分離后的氣體上升到氣相空間,然后經(jīng)過分離器內(nèi)的兩級(jí)聚結(jié)整流填料后,氣體中攜帶的較小的液滴由于碰撞聚集作用變大,在重力作用下沉降到液相空間,粒徑大于10μm 的液滴被后部氣相空間的葉片式捕霧器捕捉,氣體從氣相出口流出。從入口預(yù)分離筒分離出的油水混合物下降至分離器底部。在重力作用下,油水混合物分層。分離出的原油翻過堰板進(jìn)入油室,在油室停留一段時(shí)間后,低含水原油從油出口流出。油室液位由安裝在油室上的液位控制裝置進(jìn)行控制。分離出的水從水出口流出,油水界位和水出口流量由安裝在分離室上的油水界面控制裝置進(jìn)行控制。
5.2 射頻導(dǎo)納式物位儀測(cè)量油水界面
本文項(xiàng)目中為保證射頻導(dǎo)納界位變送器精que測(cè)量,需要對(duì)射頻導(dǎo)納界位變送器進(jìn)行正確校準(zhǔn)標(biāo)定。由于項(xiàng)目中與射頻導(dǎo)納界位儀一起工作的還有磁翻板式界位計(jì)LG02,所以在校準(zhǔn)射頻導(dǎo)納界位計(jì)之前,先把磁翻板式液位計(jì)LG02測(cè)試完畢并投入正常運(yùn)行。然后再進(jìn)行射頻導(dǎo)納界位變送器的校準(zhǔn),這樣可以使用磁翻板式界位計(jì)LG02輔助校驗(yàn)射頻導(dǎo)納界位變送器,使之更加準(zhǔn)確。
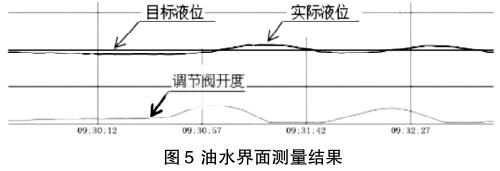
在實(shí)際應(yīng)用過程,射頻導(dǎo)納液位計(jì)克服原油粘度過高的問題,與氣動(dòng)液位調(diào)節(jié)閥聯(lián)動(dòng),準(zhǔn)確控制了油水界面高度。工藝要求油水界位正常范圍在0.2米到0.6米之間,油水界位控制目標(biāo)是0.4米。經(jīng)過多次測(cè)試,根據(jù)實(shí)際液位與目標(biāo)值偏移量,當(dāng)調(diào)節(jié)閥的PID參數(shù)為當(dāng)P=80%,I=20s時(shí),能夠使液位控制在±0.06米,滿足項(xiàng)目工藝生產(chǎn)要求(如圖5)。
6 結(jié)語
射頻導(dǎo)納式物位儀與傳統(tǒng)電容式物位儀相比有很大的優(yōu)越性,精度高、物位兩點(diǎn)標(biāo)定、非線性校正、數(shù)據(jù)永久保存、多過程量輸出等優(yōu)點(diǎn),在很多行業(yè)領(lǐng)域得到了廣泛的應(yīng)用。本文分析了電容式物位儀及射頻導(dǎo)納式物位儀工作原理,某油田地面工程測(cè)量油水界面的工程實(shí)際應(yīng)用,在該項(xiàng)目中,所使用的三相分離器是射頻導(dǎo)納式物位儀在石油工業(yè)中很典型的使用模型,文章詳細(xì)分析了三相分離器的工作環(huán)境、工作原理,及物位儀設(shè)計(jì)選取、#終實(shí)現(xiàn)了一種基于射頻導(dǎo)納式的油水面物位儀在項(xiàng)目上的成功應(yīng)用,并測(cè)量出油水界面值,且測(cè)量值符合行業(yè)工藝要求。










 關(guān)注我們 實(shí)現(xiàn)共贏
關(guān)注我們 實(shí)現(xiàn)共贏